#include <vector>#include <random>#include "structures.h"#include <fstream>#include <string>#include "distributions.h"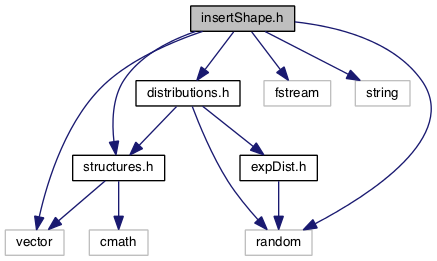

Go to the source code of this file.
Functions | |
| void | insertUserRects (std::vector< Poly > &acceptedPoly, std::vector< IntPoints > &intpts, struct Stats &pstats, std::vector< Point > &triplePoints) |
| void | insertUserEll (std::vector< Poly > &acceptedPoly, std::vector< IntPoints > &intpts, struct Stats &pstats, std::vector< Point > &triplePoints) |
| void | insertUserRectsByCoord (std::vector< Poly > &acceptedPoly, std::vector< IntPoints > &intpts, struct Stats &pstats, std::vector< Point > &triplePoints) |
| void | insertUserEllByCoord (std::vector< Poly > &acceptedPoly, std::vector< IntPoints > &intpts, struct Stats &pstats, std::vector< Point > &triplePoints) |
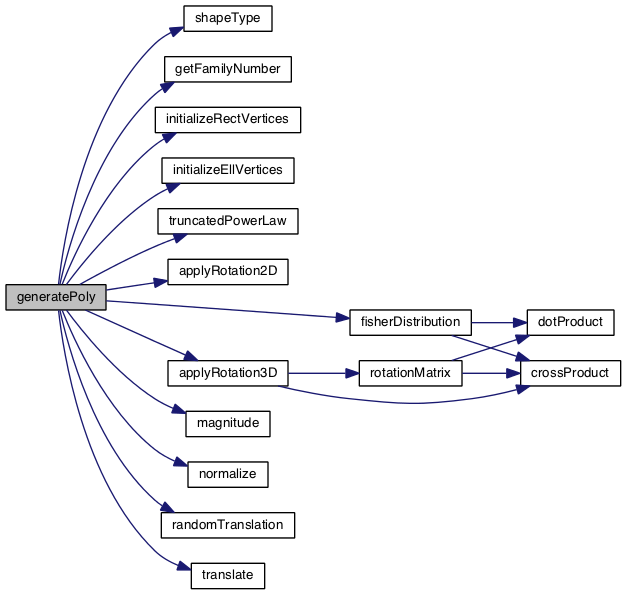
| struct Poly | generatePoly (struct Shape &shapeFam, std::mt19937_64 &generator, Distributions &distributions, int familyIndex, bool useList) |
| void | initializeRectVertices (struct Poly &newPoly, float radius, float aspectRatio) |
| void | assignAperture (struct Poly &newPoly, std::mt19937_64 &generator) |
| void | assignPermeability (struct Poly &newPoly) |
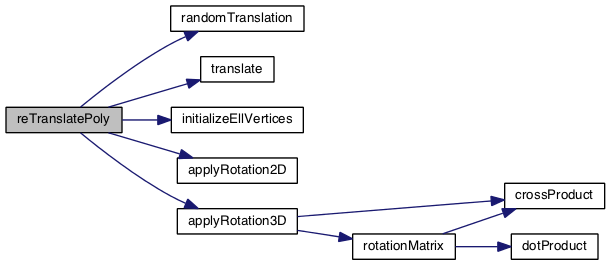
| void | reTranslatePoly (struct Poly &newPoly, struct Shape &shapeFam, std::mt19937_64 &generator) |
| bool | p32Complete (int size) |
| void | initializeEllVertices (struct Poly &newPoly, float radius, float aspectRatio, float *thetaList, int numPoints) |
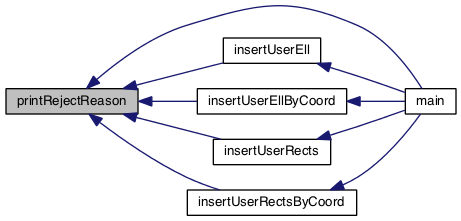
| void | printRejectReason (int rejectCode, struct Poly newPoly) |
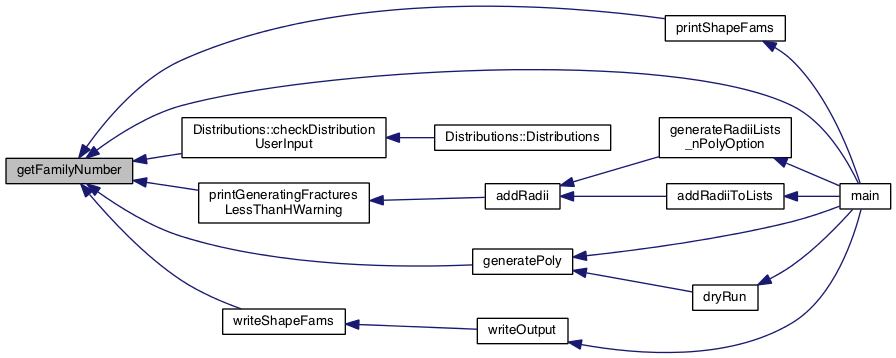
| int | getFamilyNumber (int familyIndex, int family) |
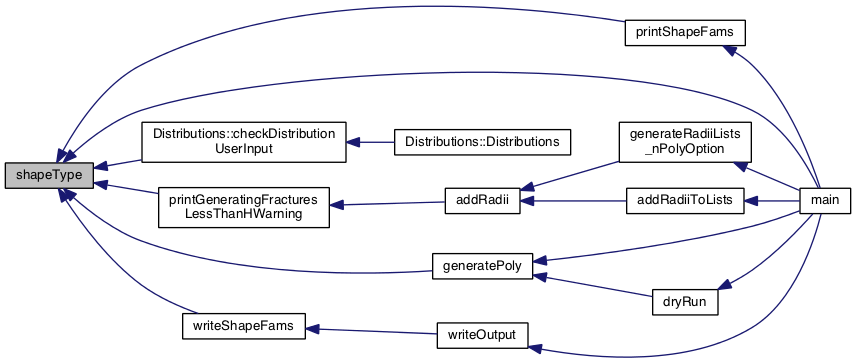
| std::string | shapeType (struct Shape &shapeFam) |
| double | getLargestFractureRadius (Shape &shapeFam) |
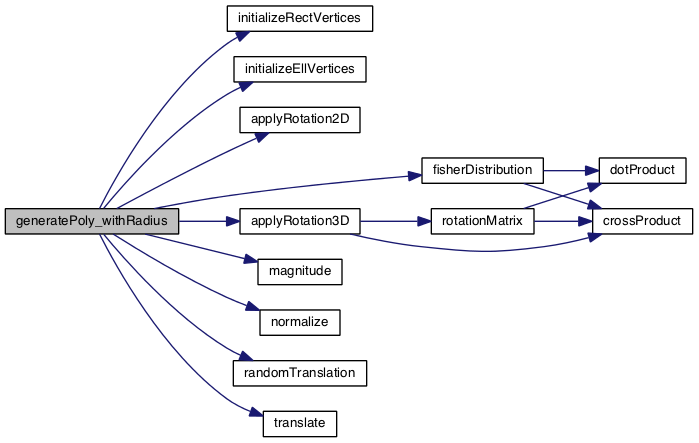
| struct Poly | generatePoly_withRadius (double radius, struct Shape &shapeFam, std::mt19937_64 &generator, Distributions &distributions, int familyIndex) |
Function Documentation
§ assignAperture()
| void assignAperture | ( | struct Poly & | newPoly, |
| std::mt19937_64 & | generator | ||
| ) |

§ assignPermeability()
| void assignPermeability | ( | struct Poly & | newPoly | ) |
Assigns permiability using user's input option Runs once at end of fracture insertion for all accepted fractures Options: 0 - Permeability of each fracture is a function of fracture aperture, given by k=(b^2)/12, where b is an aperture and k is permeability 1 - Constant permeabilty for all fractures Arg 1: Polygon/fracture to assign permiability to
Definition at line 380 of file insertShape.cpp.

§ generatePoly()
| struct Poly generatePoly | ( | struct Shape & | shapeFam, |
| std::mt19937_64 & | generator, | ||
| Distributions & | distributions, | ||
| int | familyIndex, | ||
| bool | useList | ||
| ) |
Generates a polygon based on a stochastic fracture shape family NOTE: Function does not create bouding box. The bouding box has to be created after fracture truncation Arg 1: Shape family to generate fracture from Arg 2: Random generator, see std <random> c++ library Arg 3: Distributions class, currently used only for exponential dist. Arg 4: Index of 'shapeFam' (arg 1) in the shapeFamilies array in main() Arg 5: True - Use pre-calculated fracture radii list to pull radii from False - Generate random radii every time (used in dryRun() which estimates number of fractures needed when using p32 option and generates the radii lists) Return: Random polygon/fracture based from 'shapeFam'
Definition at line 26 of file insertShape.cpp.

§ generatePoly_withRadius()
| struct Poly generatePoly_withRadius | ( | double | radius, |
| struct Shape & | shapeFam, | ||
| std::mt19937_64 & | generator, | ||
| Distributions & | distributions, | ||
| int | familyIndex | ||
| ) |
Similar to generatePoly() except the radius is passed to the function. Generates a polygon Shape (ell or rect) still comes from the shapes' familiy NOTE: Function does not create bouding box. The bouding box has to be created after fracture truncation Arg 1: Radius for polygon Arg 2: Shape family to generate fracture from Arg 3: Random generator, see std <random> c++ library Arg 4: Distributions class, currently used only for exponential dist. Arg 5: Index of 'shapeFam' (arg 1) in the shapeFamilies array in main() Return: Polygond with radius passed in arg 1 and shape based on 'shapeFam'
Definition at line 221 of file insertShape.cpp.

§ getFamilyNumber()
| int getFamilyNumber | ( | int | familyIndex, |
| int | familyShape | ||
| ) |
Turns the global family number into a number the user can more easily understand. The shapeFamily array contains both rectangle and ellipse families. For example: If shapeFamilies array has 3 families of ellipse families and 3 families of rectangle families: {ell, ell, ell, rect, rect, rect} If we want the local family number for index 3, it will return family 1, meaning the first rectangular family. This function is used in conjuntion with shapeType().
Arg 1: Family index which family belings to in main()'s 'shapeFamilies' array Arg 2: Rectangle or ellipse family 0 - Ellipse 1 - Rectangle
Definition at line 688 of file insertShape.cpp.
§ getLargestFractureRadius()
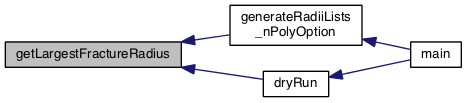
| double getLargestFractureRadius | ( | Shape & | shapeFam | ) |
Returns the largest fracture radii defined by the user for a fracture family. This function is used for the 'forceLargeFractures' option in the input file Arg 1: Shape family Return: User's maximum radii for shapeFam (arg 1)
Definition at line 717 of file insertShape.cpp.
§ initializeEllVertices()
| void initializeEllVertices | ( | struct Poly & | newPoly, |
| float | radius, | ||
| float | aspectRatio, | ||
| float * | thetaList, | ||
| int | numPoints | ||
| ) |
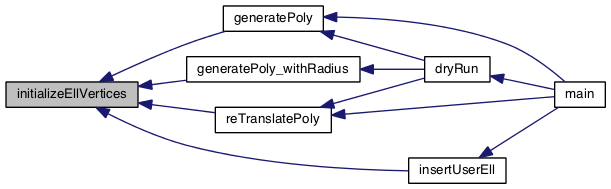
Initializes ellipse vertices on x-y plane Arg 1: Poly to initialize Arg 2: Radius (xradius = radius. yradius = radius * aspectRatio) Arg 3: Aspect ratio
Definition at line 432 of file insertShape.cpp.
§ initializeRectVertices()
| void initializeRectVertices | ( | struct Poly & | newPoly, |
| float | radius, | ||
| float | aspectRatio | ||
| ) |
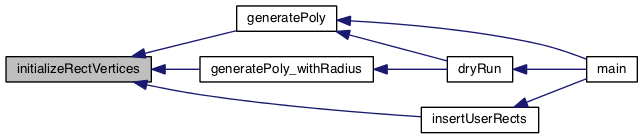
Initializes vertices for rectangular poly using radius (1/2 x length) and aspcet ratio. (xradius = radius, yradius = radius * aspectRatio) Poly will be on x-y plane Arg 1: Polygon to initialize vertices Arg 2: Radius (1/2 x dimension length) Arg 3: Aspect ratio
Definition at line 403 of file insertShape.cpp.
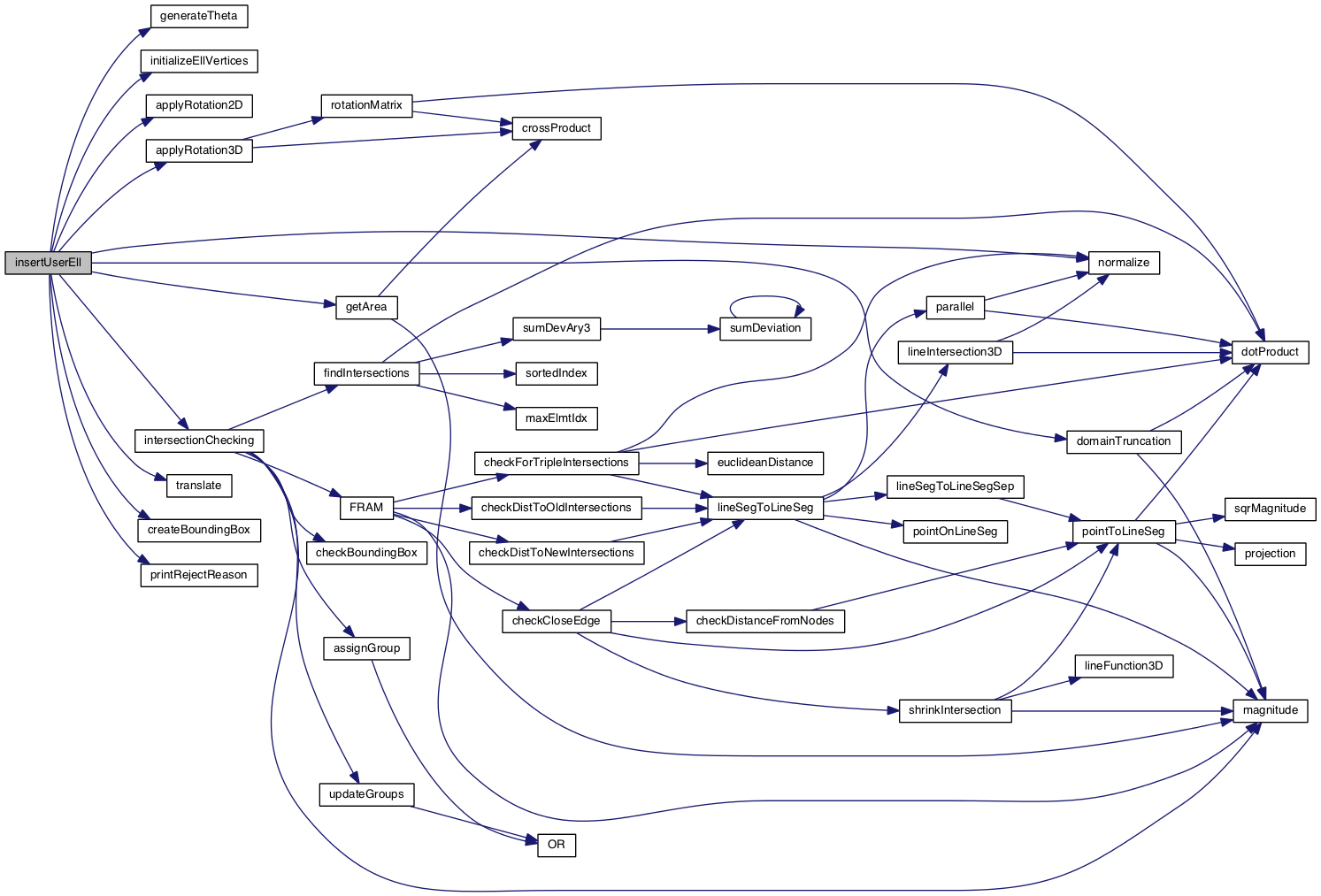
§ insertUserEll()
| void insertUserEll | ( | std::vector< Poly > & | acceptedPoly, |
| std::vector< IntPoints > & | intpts, | ||
| struct Stats & | pstats, | ||
| std::vector< Point > & | triplePoints | ||
| ) |
Inserts a user defined ellipse into the domain. Intersection checking, FRAM, and rejection/accptance are all called within this function. Arg 1: Array for all accepted polygons Arg 2: Array for all accepted intersections Arg 3: Program statistics structure Arg 4: Array of all triple intersection points
Definition at line 21 of file insertUserEll.cpp.

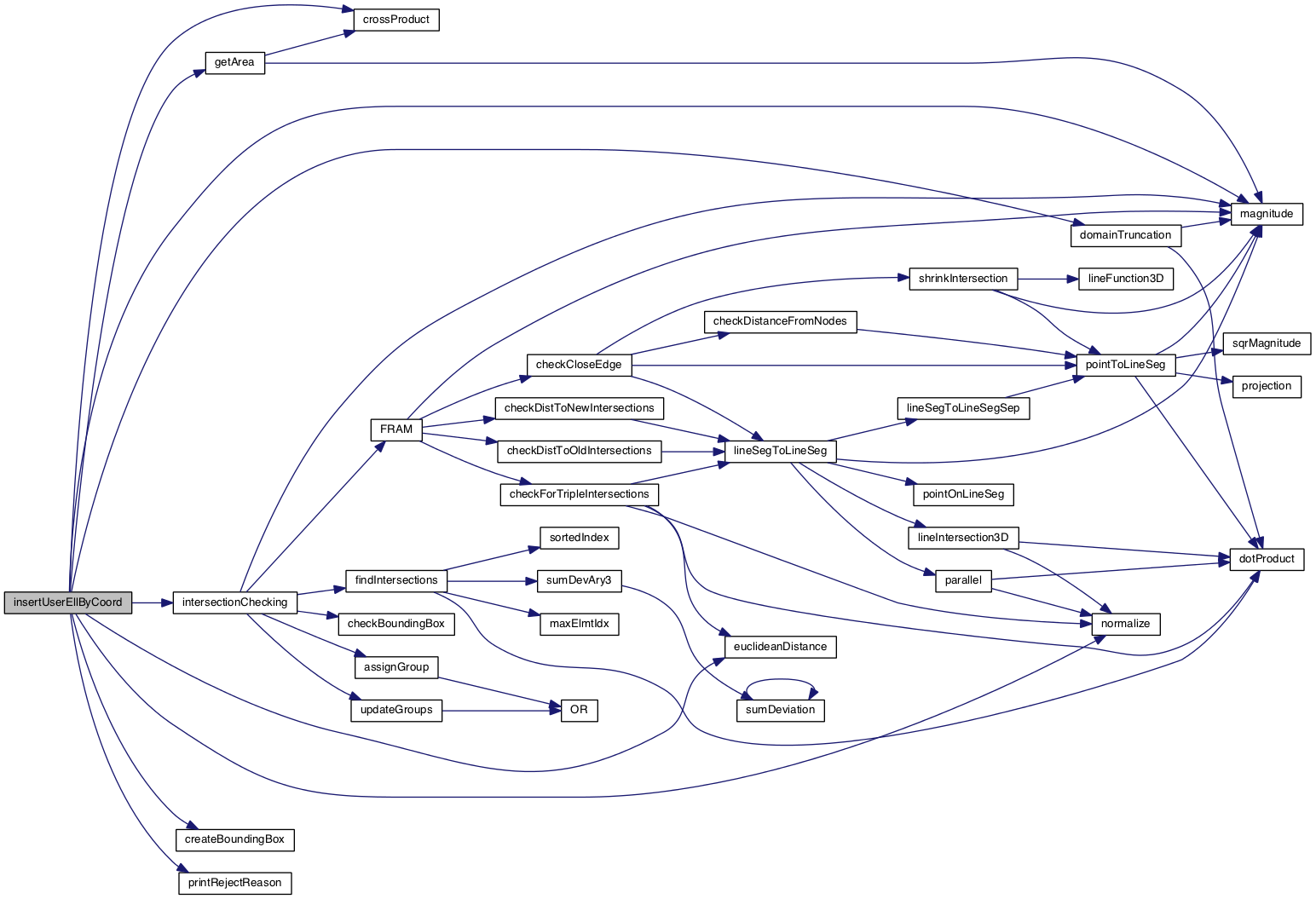
§ insertUserEllByCoord()
| void insertUserEllByCoord | ( | std::vector< Poly > & | acceptedPoly, |
| std::vector< IntPoints > & | intpts, | ||
| struct Stats & | pstats, | ||
| std::vector< Point > & | triplePoints | ||
| ) |
Inserts user ellipses using defined coordinates provided by the user (see input file). Intersection checking, FRAM, and rejection/accptance are all contained within this function. Arg 1: Array for all accepted polygons Arg 2: Array for all accepted intersections Arg 3: Program statistics structure Arg 4: Array of all triple intersection points
Definition at line 21 of file insertUserEllByCoord.cpp.

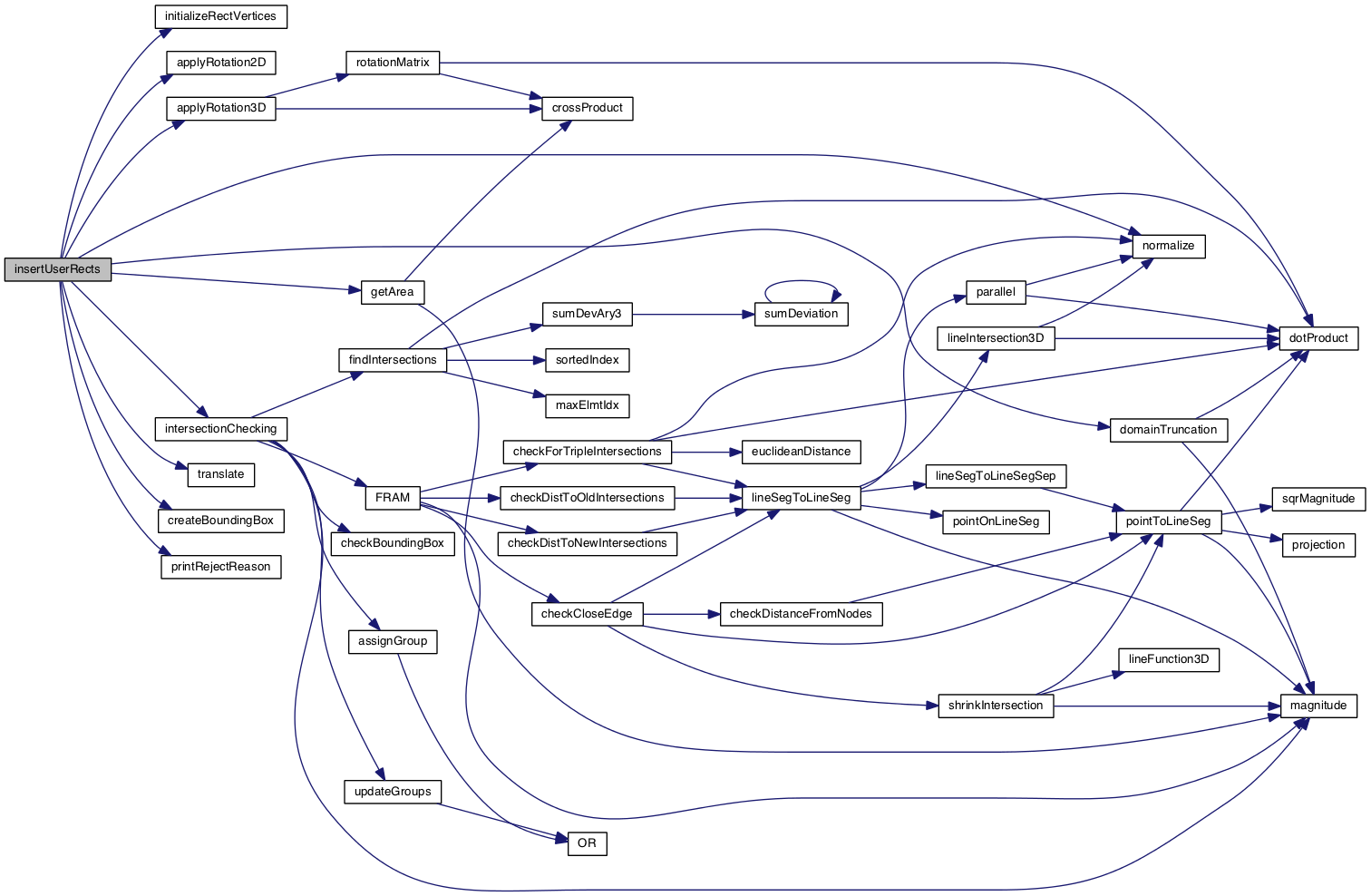
§ insertUserRects()
| void insertUserRects | ( | std::vector< Poly > & | acceptedPoly, |
| std::vector< IntPoints > & | intpts, | ||
| struct Stats & | pstats, | ||
| std::vector< Point > & | triplePoints | ||
| ) |
Inserts a user defined rectangle into the domain Intersection checking, FRAM, and rejection/accptance is all contained within this function. Arg 1: Array for all accepted polygons Arg 2: Array for all accepted intersections Arg 3: Program statistics structure Arg 4: Array of all triple intersection points
Definition at line 22 of file insertUserRects.cpp.

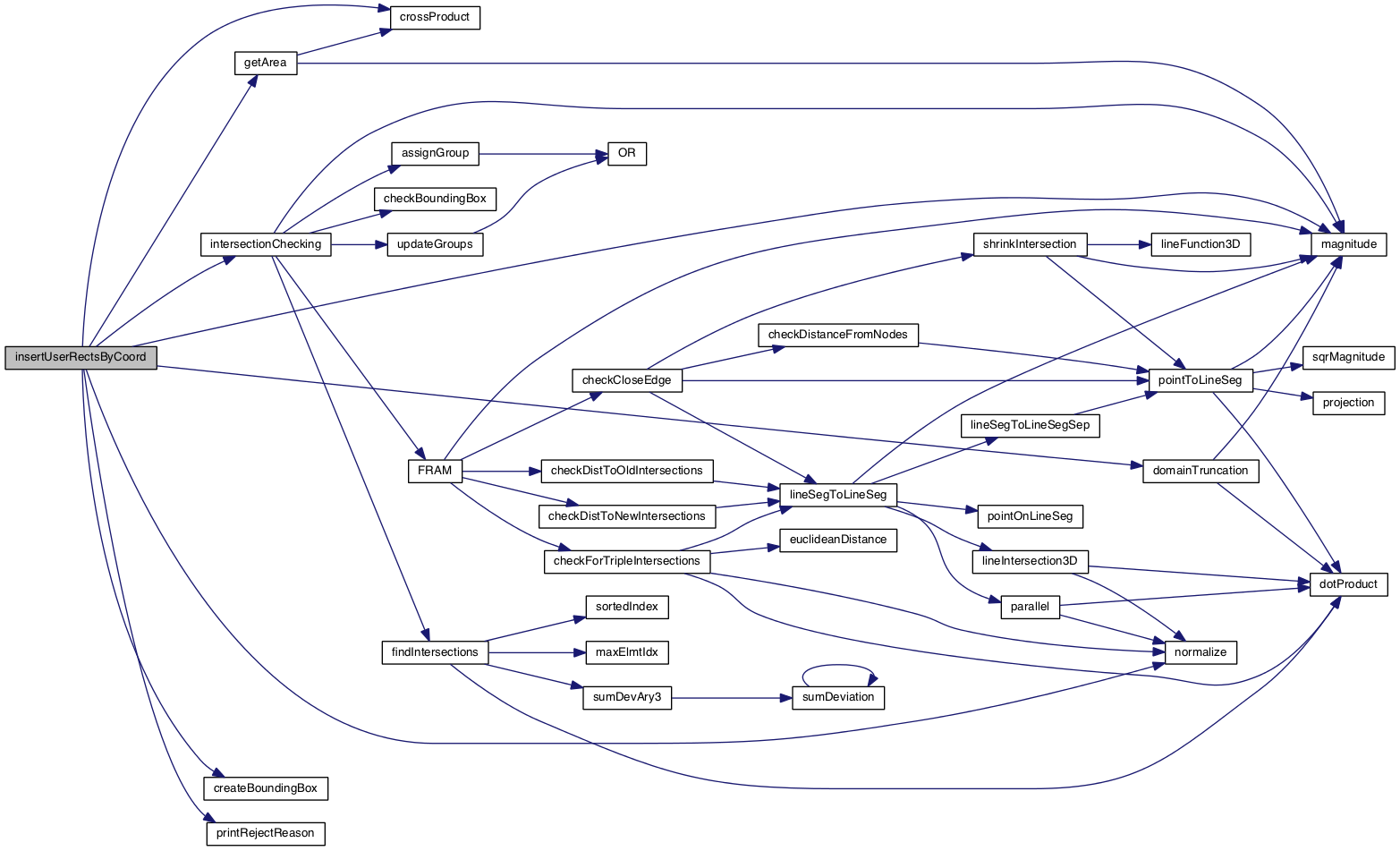
§ insertUserRectsByCoord()
| void insertUserRectsByCoord | ( | std::vector< Poly > & | acceptedPoly, |
| std::vector< IntPoints > & | intpts, | ||
| struct Stats & | pstats, | ||
| std::vector< Point > & | triplePoints | ||
| ) |
Inserts user rectangles using defined coordinates provided by the user (see input file). Intersection checking, FRAM, and rejection/accptance are all contained within this function. Arg 1: Array for all accepted polygons Arg 2: Array for all accepted intersections Arg 3: Program statistics structure Arg 4: Array of all triple intersection points
Definition at line 21 of file insertUserRectsByCoord.cpp.

§ p32Complete()
| bool p32Complete | ( | int | size | ) |
For th P32 stopping option (see input file) Function checks the status of the fractures families target P32 The 'p32Status' array is 1 to 1 with the total number of families When a family's P32 requirement has been met, it's corresponding element in 'p32Status' is set to '1' For example, the status for shapeFamiliy[0] is in p32Status[0]. If p32Status[0] = 1, shapeFamily[0] has met its p32/fracture intensity target, else it has not and will keep inserting more fractures
Arg 1: Size of 'p32Status' array (same size as the shapeFamilies array) Return: True once ALL p32 targets have been met for all families False otherwise
Definition at line 598 of file insertShape.cpp.

§ printRejectReason()
| void printRejectReason | ( | int | rejectCode, |
| struct Poly | newPoly | ||
| ) |
Function prints fracture rejection reasons to user based on reject code Currtenly only used for user defined fractures. Arg 1: Rejection code Arg 2: Poly which was rejected
Definition at line 617 of file insertShape.cpp.
§ reTranslatePoly()
| void reTranslatePoly | ( | struct Poly & | newPoly, |
| struct Shape & | shapeFam, | ||
| std::mt19937_64 & | generator | ||
| ) |
Re-translate poly Re-initializes/re-builds (if needed) polygon at origin and translates to new position preserving its size, shape, and normal vector This helps hit target distributions since we reject less Arg 1: Polygon Arg 2: Shape family structure which Polygon belongs to Arg 3: Random Generator
Definition at line 455 of file insertShape.cpp.

§ shapeType()
| std::string shapeType | ( | struct Shape & | shapeFam | ) |
Print type of family (ellipse or rectangle) Arg 1: Shape family
Definition at line 700 of file insertShape.cpp.